NEXUS AURORA | MDRS SSAM
MDRS SSAM (Scout, Sample, and Map), known as the Scout system, is currently in development by Nexus Aurora (NA) for the Mars Desert Research Station (MDRS) with support from the Mars Society.
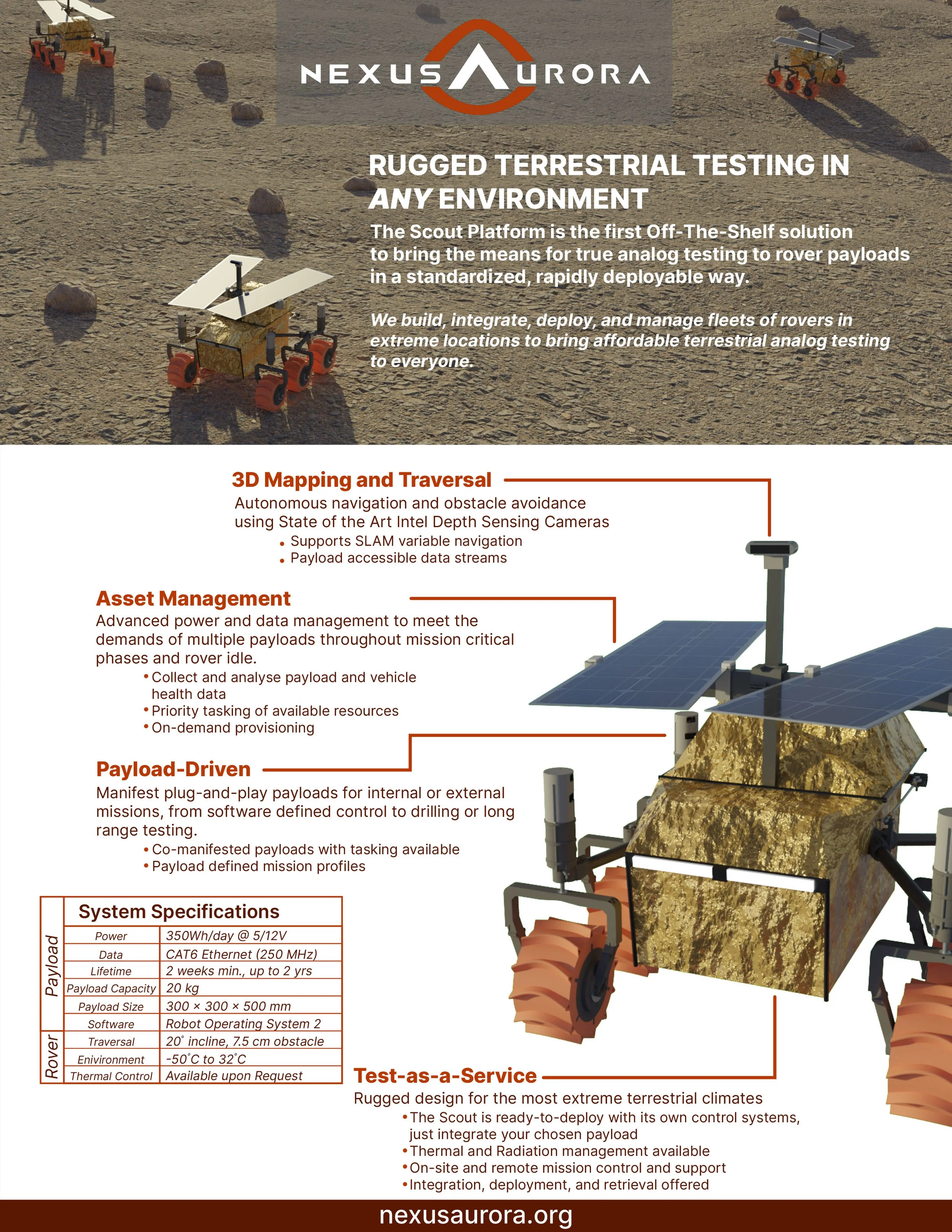
Nexus Aurora (NA) is a community-based project incubator; the organization’s primary goal is to facilitate open-source solutions to the complex problems of space settlement. Working with the Mars Society, NA is developing SSAM (Scout Sample And MAP), a fleet of small robots designed to work in a swarm for terrain scouting and sampling. This project presents a vehicle design and mission architecture for a rapid, cost-efficient, and redundant scout system for high-fidelity mapping and exploration of mission areas. A swarm robotics approach utilizing highly-modular, simplified rover platforms and existing commercially available equipment are able to autonomously build 3D maps of large swaths of terrain that include information on topology, mineral concentrations, ambient conditions, and additional data pertinent to mission planning and in-situ resource utilization. Standardized, rack-style payload slots with integrated power support allow customization of the platforms for specialist roles without changes to overall design or logistics. This system represents a considerably valuable mechanism for increasing cost-efficiency and chance of mission-success of interplanetary operations from planning to end of mission life.
Swarm robotics (or artificial swarm intelligence) is an evolving field of AI research and development drawing inspiration from nature and swarm behaviors of insects, such as bee or ant colonies, bird flocking, and other biological areas where swarm behavior occurs. Swam intelligence systems typically consist of a population of simple robots interacting locally with one another and with their environment. The technology hinges on machine learning capacity: if one robot learns from experience that a certain maneuver is beneficial, the whole swarm learns this.
Informed mission planning is a crucial step for successful manned missions both in space and on other bodies. Precursor missions have frequently been used as both technological testbeds and implementers of prerequisite infrastructure to support future missions as part of an incremental space exploration strategy. While Mars presents a new opportunity for human exploration and long-term missions, it also presents new logistical challenges in mission planning and execution. This is due to environmental, communications, and resource availability challenges not experienced with manned missions within the Earth system. Consequently, missions designed for exploration and scouting of areas of interest before the arrival of humans become a necessity.
MDRS LEADS: James Burk + Erin Kennedy
PROJECT LEADS: Cameron Rough + Dan Johnson + Tibi Savin
RATIONALE / HYPOTHESIS
Swarm robotics present a promising time and cost-efficient way to explore Martian terrain, with wide ranging utility including 3D mapping and sampling tasks.